Robo Stamping 4 Aks pou machin pou laprès



Entwodiksyon pwodwi
An konsiderasyon demann aktyèl pou amelyorasyon ak transfòmasyon endistri stamping lan, yo te konsepsyone epi devlope yon robo manyen stamping 4-aks ki gen gwo fleksibilite ak kontwòl senp.
Robo kat aks pou estasyone a adopte yon konsepsyon kat aks, fòm kontra enfòmèl ant, ti gwosè, pwa lejè, lajman itilize nan soude ak argon, palètizasyon, manyen, estasyone ak lòt domèn, ka konplete yon manyen ki estab, soude avèk presizyon. Manipilatè kat aks pou pwensonaj la ka fè operasyon estasyone avèk fleksibilite nan yon ti espas, epi li senp e pratik pou enstale ak debogaj.
Pati prensipal yo
Tout pyès mak Chinwa kalite siperyè
Motè Sèvo
Mak sèrvo motè a se Ruking, yon mak Chinwa ki gen avantaj reyaksyon rapid, gwo rapò koupl/inèsi nan koupl demaraj, elatriye. Li ka reziste kondisyon fonksyònman difisil ki fè operasyon akselerasyon ak deselerasyon pou pi devan ak pou pi dèyè trè souvan epi li ka sipòte plizyè surcharge nan yon ti tan.
SISTÈM KONTWÒL LNC
Robo Yooheart la adopte pwogramasyon ansèyman. Li senp, pratik epi fleksib nan operasyon. Robo Yooheart la sipòte tou pwogramasyon a distans, ki ka aplike nan divès pwogram konplèks.
KÒ ROBÒT LA
Kò a adopte pwosesis Distribisyon anba presyon an, lè l sèvi avèk kavite mwazi an pou aplike gwo presyon sou fòmasyon metal k ap fonn lan, kò a fòme yon dansite segondè, yon rijidite solid, epi pwòp pwa li pi lejè.
Montre detay
Segondè Presizyon
Repons aksyon rapid
Epi nivo a ap mennen
nan peyi a
Senp nan estrikti
Fasil pou kenbe
Pi efikas an tèm de pri
Gwo vitès ak estabilite
Chemen egzak
Solisyon pafè pou stamping
Paramèt Robo
| Pwojè | Espesifikasyon | Pwojè | Espesifikasyon | Aks | Ranje mouvman | Vitès maksimòm | Diagram kre |
| Aks | 4 | Tanperati | 0℃-45℃ | J1 | ±170º | 190º/s | —— |
| Kapasite | 3.7KVA | Imidite | 20-80% RH (Pa gen imidite) | J2 | +10º~+125º | 120º/s | —— |
| Pwa | 170KG | Vibrasyon | Anba 4.9M/S² | J3 | +10º~-95º | 120º/s | —— |
| Chaj maksimòm | 10KG | Lòt moun | Pa gen gaz ak likid ki ka pran dife ak koroziv, kenbe lwen sous bri elektrik | J4 | ±360º | 200º/s | —— |
| Maksimòm ranje travay | 140CM | Repetabilite | ±0.08mm | Nivo IP | IP65 | Enstalasyon | Tè |
Aplikasyon Robo
Chaje ak dechaje pwodwi èkstruzyon cho
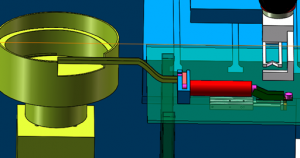
Pwojè sa a sitou konsantre sou fòme pyès kwiv an kwiv. Pwosesis pwensonaj wouj la se yon pwosesis èkstruzyon cho. Pandan pwensonaj wouj la, yo chofe materyèl metal la a yon sèten tanperati epi yo mete l nan yon mwazi prechofe. Apre yon sèl mouvman resipwòk machin presyon an, yo defòme materyèl metal la plastikman pou jwenn gwosè, fòm ak bon pwopriyete mekanik pou pyès pwensonaj yo. Kliyan an adopte yon robo manipilasyon 4 aks Yooheart pou chaje epi dechaje pyès metal wouj la.
Apèsi sou Solisyon Entegrasyon an
Pwojè a gen ladan yon près pwensonaj, yon robo Yunhua 4 aks 10kg, yon zouti pozisyonman segondè, yon aparèy pou bouche silenn konbine, eksetera. Done yo konnen tankou tan, chaj nominal ak kondisyon travay yo tout nan seri paramèt nominal HY1010B-140 la.


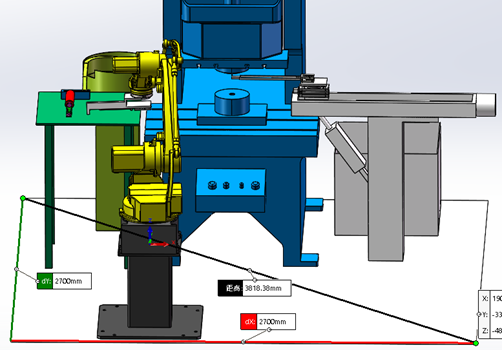
Apèsi sou pwosesis pwodiksyon an
Manyèlman bay manje pou palan▶ bay manje ak plak vibrasyon▶ Pozisyonman aparèy bay manje anvan chofaj▶ chofaj tib ak kouran toubiyon▶ pozisyonman aparèy segondè pou pozisyone▶ blokaj robo▶ presyon ak près pwenson▶ dechaj aparèy bay manje silenn
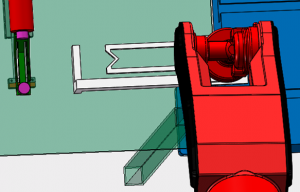
Rezime aksyon aparèy pou bay manje ak pozisyonman
Nouri plak vibrasyon an manyèlman ▶ Plak vibrasyon an se sous materyèl pou tib chofaj kouran eddy a ▶ Zouti pozisyon segondè a se pozisyonman kranpon robo a
Apèsi sou aksyon aparèy bloke a
Robo a pral bloke materyèl kwiv ki byen pozisyone ▶ pou fòme pwenson
Sèvis apre-vant
Nou gen yon sèvis apre-apre pafè pou ede w aprann operasyon an menm si ou pa janm itilize robo endistriyèl epi rezoud pwoblèm pandan w ap itilize li.
Premyèman, nou pral bay manyèl ki gen rapò ak yo pou ede ou konprann kèk enfòmasyon sou robo a.
Dezyèmman, nou pral bay yon seri videyo ansèyman. Ou ka swiv videyo sa yo etap pa etap, depi fil elektrik, pwogramasyon senp pou rive nan konplete pwogram konplèks. Se fason ki pi efikas pou ede w nan sikonstans kowonaviris la.
Finalman, nou pral bay sèvis sou entènèt ak plis pase 20 teknisyen. Si ou gen nenpòt kesyon, ou ka kontakte nou nenpòt ki lè epi n ap ede ou san pèdi tan.


RFQ
K. Èske sa an sekirite pou travayè yo?
A. Wi, youn nan avantaj itilizasyon robo pou chwazi epi mete se pwoteje travayè yo kont blesi. Yon travayè ka manyen 5 a 6 inite machin CNC.
K. ki kalite pwodwi yon robo ka itilize pou chaje ak dechaje?
A. Chak chajè machin robotik ka ekipe ak zouti nan bout bra ki konpatib ak machin ou ak pwodwi ou. Yo trè presi epi yo gen ladrès pou manyen pyès la avèk swen.
K. Se sèlman yon bout zouti bra yo ki ka itilize pou chaje ak dechaje robo a?
A. Bra robo endistriyèl la ka modifye pwogram nan ak kranpon priz la, chanjman rapid nan depo entelijan an, vitès debogaj, elimine nesesite pou anplwaye yo men tou pou tan fòmasyon an, yo ka byen vit mete nan pwodiksyon.
K. Èske gen lòt avantaj nan chaje ak dechaje robo a?
A. Amelyore kalite aparans pyès travay la: liy pwodiksyon otomatik ak robo, soti nan manje, blokaj, koupe antyèman pa robo, pou diminye lyen entèmedyè yo, kalite pyès la amelyore anpil, espesyalman sifas la pi bèl.
K. Èske ou ka bay solisyon konplè pou chaje ak dechaje robo?
A. wi, nou ka fè sa ansanm ak konsesyonè nou an.