Fabrikasyon endistriyèl se yon lyen enpòtan pou pwomosyon devlopman ekonomik ak sosyal. Kounye a, rechèch sou ekipman soude otomatik yo ap vin pi pwofon e pi konkrè, sa ki fè yo lajman itilize nan pwodiksyon divès kalite estrikti soude.
Nan pwosesis soudaj otomatik la, yon kontwòl entelijan ak dijital rezonab sou erè espasman asanblaj soude a rive nan yon sèten limit. Sou baz sa a, diferans pozisyon pyès travay la, devyasyon jwenti pyès travay la ak lòt faktè yo dwe konsidere tou. Se poutèt sa, teknoloji swivi kouti soude lazè jwe yon wòl enpòtan nan pwosesis soudaj la.
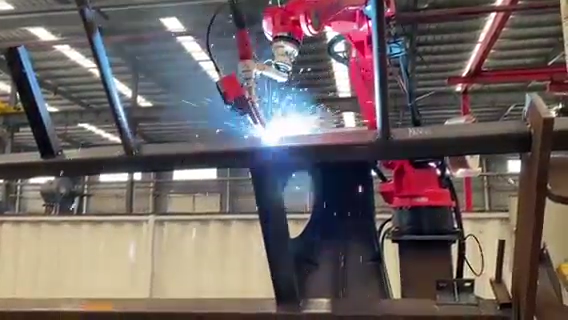
Soude baz machin tank siman, sèt aks wotasyon òbit tè a, uit aks, ak soude lazè.
-Pozisyon pyès travay la varye anpil
-Gen yon devyasyon nan koneksyon pyès la
-Yo bezwen yon gwo presizyon soude
-Move anviwònman soude ak lafimen
Nan ka sa a, yo itilize robo entelijan Yooheart HY1006A-145 la pou soude ak sistèm swivi kouti soude lazè, ki gen gwo fleksibilite, estabilite ak fyab.
Anvan chak soudaj, ekipman an premye eskane epi anrejistre kowòdone kouti soude a atravè lokalizatè kouti soude a, epi answit kalkile konpansasyon kowòdone a pa algorithm entèn lan epi mete paramèt kowòdone referans yo nan tan reyèl la pou korije devyasyon reyèl la nan tan, pou asire sele ak entegrite pwodwi a apre soudaj.
Metòd "Entèseksyon kat pwen"
Jan tout moun konnen, de pwen detèmine yon liy dwat, men asanblaj pyès travay la ap fòme yon ang. Algorit konvansyonèl la pa ka detèmine pozisyon li. Sa mande pou itilize metòd "entèseksyon" katrè a. De liy ki kwaze pwodui pwen entèseksyon an. Algorit espesyal la kalkile pozisyon kowòdone pwen entèseksyon an atravè detèminasyon kowòdone kat pwen li te ye yo, pou reyalize objektif soudaj la.

Sistèm swiv kouti lazè
Sistèm swivi kouti soude lazè a konpoze sitou de detèktè lazè ak tèminal siveyans. Detèktè lazè a itilize pou akizisyon aktif ak pwosesis an tan reyèl enfòmasyon kouti soude, epi li kenbe kominikasyon an tan reyèl ak robo endistriyèl yo. Tèminal siveyans lan kontwole epi konfigire detèktè yo. Sistèm nan genyen tou fonksyon pou lokalize, swiv ak eskane anvan soude pou satisfè bezwen soude entelijan.
Prensip fonksyònman: Eskane kouti soude, ajisteman imaj nyaj pwen, algorithm nan idantifye pwen karakteristik yo avèk presizyon, epi done an tan reyèl rezilta kalkil yo voye bay robo a, nan enstriksyon kontwòl, modifye oswa gide operasyon robo a.
Solisyon plak corrugated

Solisyon soude ploge otomatik twou wonn

Solisyon kouti sikilè

Solisyon plak tib
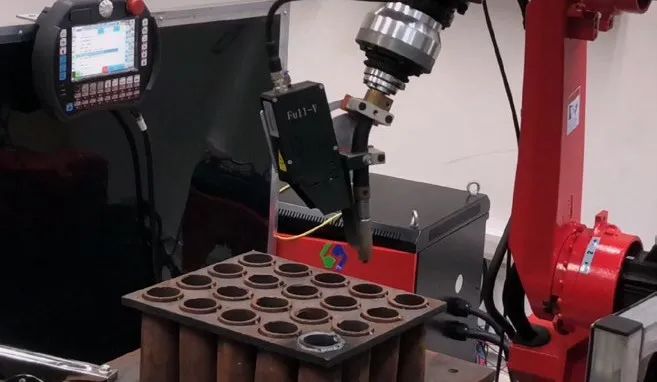
Yunhua Intelligent ka bay deplwaman rapid, solisyon automatisation an sekirite epi efikas ak solisyon sistèm an tan reyèl. Sistèm swivi kouti soude vizyon lazè a pèmèt robo soude a reyalize lokalizatè ak swivi kouti soude an tan reyèl, epi korije trajektwa soude a dapre konpansasyon kouti soude a nan pwosesis soude a, pou reyalize soude entelijan reyèl la.
Dat piblikasyon: 9 avril 2022



